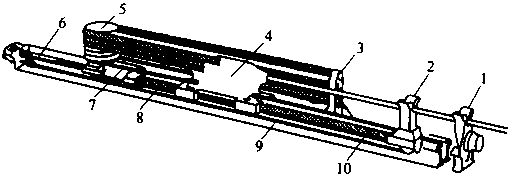
图2-1推进器
1—前夹钎器;2—中间托钎器;3—软管托架;4—凿岩机托座;
5—软管滚筒;6—活塞杆;7—返回钢绳;8—油缸;9—推进钢绳;10—导轨
因液压凿岩机有进、回油路的两条液压油软管,且推进行程较长,为避免凿岩机前进 和后退时,两条油管(拖着跑,所以在推进器上增设了软管托架3和软管滚筒5;因钎杆 较长,故又设置了中间托钎器7;还有一种具有伸缩功能的推进器,如瑞典阿特拉斯•科普柯,公司的BMHT1000和BMHT6000系列的推进器都具有伸缩功能(图2-2所示为 BMHT1000型的)。BMHT1000推进器配有两种长短不同的钎杆,其结构有以下特点: (1)导轨架采用坚固的铝合金,质量轻、抗弯曲、抗变形与防震能力强;(2 )采用易于更换 的导轨套,使得推进器导轨具有较长的寿命;(3 )具有较大的承载能力和较低的维修费 用;(4)能够快速返回。
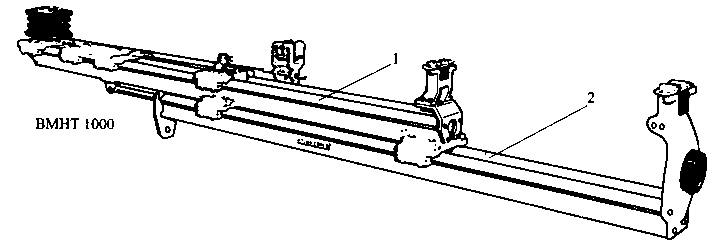
图2-2 BMHT1000推进器
1—上导轨架;2—下导轨架
第二节钻 臂
钻臂是钻车的关键部件,它支撑并移动推进器使其上的凿岩机能有效地钻凿工作面 上所有不同位置和角度的炮孔。钻臂主要由转柱、主支臂、托架及液压缸等组成,可实现 钻臂的水平摆动、起落和伸缩,主支臂的自转,以及推进器的水平摆动、翻转和补偿推进 等各种动作。
钻臂的分类已如前述,有直角坐标式、极坐标式、复合坐标式和直接定位式四种,现 分述如下:
(1)直角坐标钻臂 直角坐标钻臂如图2-3所示,这种钻臂在凿岩作业中能完成以 下动作:钻臂升降,B为钻臂水平摆动,C为托架仰俯角,D为托架水平摆角,%为推 进器补偿运动,这五种动作是直角坐标钻臂的基本动作。
直角坐标式的钻臂是传统型钻臂,其分类符号为XY,它的优点是:结构简单,定位直 观、操作容易,适合钻凿直线和各种形式的倾斜掏槽孔以及不同排列方式并带有各种角 度的炮孔,能满足凿岩爆破的工艺要求,因此过去应用很广,国内外许多钻车都采用这种 形式的钻臂。其缺点是使用的油缸较多,操作程序比较复杂,对一个钻臂而言,存在着较 大的凿岩盲区在钻臂的各种范围内,有一定的无法凿岩区域称为凿岩盲区。
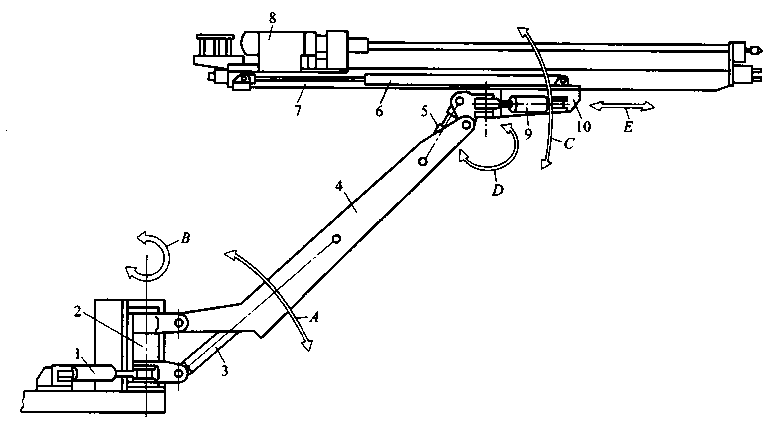
图2-3直角坐标钻臂
1—摆臂缸;2—转柱;3—支臂缸;4—主支臂;
5—仰俯角缸;6—补偿缸;7—推进器;8—凿岩机;9—摆角缸;10—托架
如果不用转柱,而以齿条齿轮式回转机构代替,则钻臂运动的功能具有极坐标性质, 组成极坐标形式的钻车。
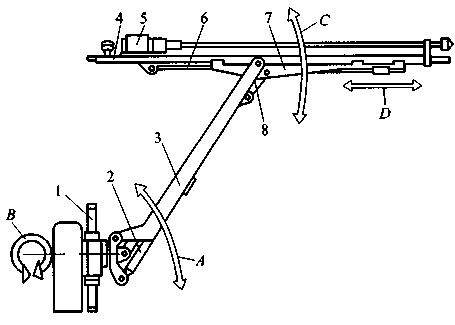
图2-4极坐标钻臂
1—齿轮齿条式回转机构;2—支臂油缸;3—主支臂;
4—推进器;5—凿岩机;6—补偿油缸;7—托架;8—仰俯角油缸
(2)极坐标钻臂 极坐标钻臂如图2 4所示,这种钻臂与直角坐标式相比,减少了 油缸数量,简化了操作程序,它在调定炮孔位置时只需做以下动作:!钻臂升降,"钻臂 回转,C托架仰俯角,$推进器补偿运动。钻臂可升降并可回转360°,构成了极坐标运动 的工作原理。这种钻臂对顶板、侧壁和底板的炮孔,都可以贴近岩壁钻进,减少超挖量。钻 臂的弯曲形状有利于减小凿岩盲区。
这种钻臂也存在一些问题,如不能适应打楔形、锥形等倾斜形式的掏槽炮孔;操作调 位直观性差;对于布置在回转中心线以下的炮孔。司机需要将推进器翻转,使钎杆在下 面凿岩,这样对卡钎故障不能及时发现和处理;另外也存在一定的凿岩盲区等。极坐标 钻臂的分类符号为R;
(3 )复合坐标钻臂 复合坐标钻臂(如图2-5所示)综合了直角坐标式和极坐标式 二者的特点,它既能凿钻正面孔,又能钻两侧任意方向的炮孔,垂直向上的锚杆孔和采矿 孔,可以克服凿岩盲区。
由图2-5知,该钻臂有一个主支臂4和一个副臂6,主、副臂的油缸布置与直角坐标 钻臂相同,另外还有齿轮齿条式回转机构1。这样就能钻凿任意方向的炮孔,并避免了凿 岩盲区,但其结构复杂、外形笨重,这种钻臂和伸缩式钻臂均适用于大型钻车。复合坐标 钻臂的分类符号为XY- R或RXY。
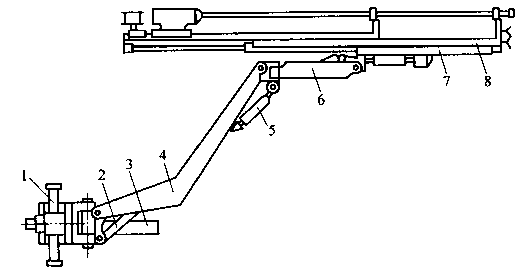
图2-5复合坐标钻臂
1—齿轮齿条式回转机构;2—支臂缸;3—摆臂缸;
4—主支臂;5—仰俯角缸;6—副臂;7—托架;8—伸缩式推进器
(4 )直接定位式钻臂 图2-6所示为直接定位式钻臂,其分类符号为A - V和A- R两类。
直接定位式钻臂由一对支臂缸1和一对仰俯角缸3组成钻臂的变幅机构和平移机 构。钻臂的前、后Z点都是十字Z接,十字Z接的结构如图2-6D放大所示。
支臂缸和仰俯角缸的协调工作,不但可使钻臂做垂直面的升降和水平面的摆臂运动,而且可使钻 臂做倾斜运动(例如45。角等。这时推进器可随着平移。推进器还可以单独做仰俯角和 水平摆角运动。钻臂前方装有推进器翻转机构4和托架回转机构5;这样的钻臂具有万 能性质,它不但可向正面钻平行孔和倾斜孔,也可以钻垂直侧壁、垂直向上以及呈各种倾 斜角度的炮孔。其特点是调位简单、动作迅速、具有空间平移性能、操作运转平稳、定位 准确可靠、凿岩无盲区,性能十分完善;但结构复杂,控制系统复杂。
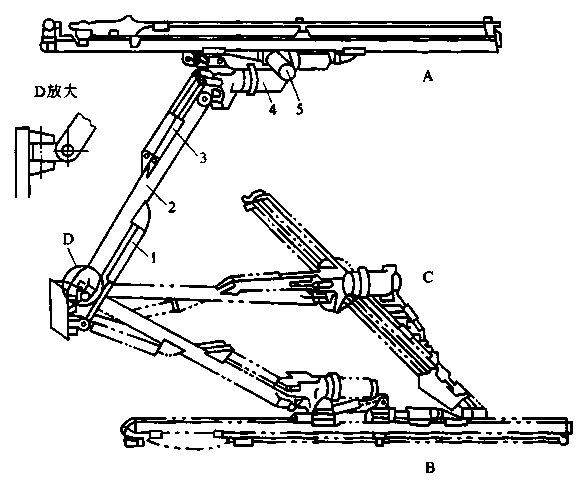
图2-6直接定位式钻臂
A—上部钻孔位置;B—下部钻孔位置;C—垂直侧面钻孔位置
1—支臂缸;2—主支臂;3—仰俯角缸;4—推进器翻转机构;5—托架回转机构
钻臂的分类和动作元件配置见表2-1。
表2-1钻臂4-6-18分类表
|
运动方式分类 |
分类符号 |
钻臂各动作元件的配置 |
配置符号 |
凿岩范围 图形代号 |
|
|
|
1.摆臂0支撑-仰俯0摆角0补偿 |
XY - YXZ |
① |
|
直角坐标式 |
XY |
2.摆臂0支撑-仰俯0摆角0翻转0补偿 |
XY - YXRZ |
② |
|
3.摆臂0支撑-伸缩0仰俯0摆角0补偿 |
XY- ZYXZ |
① |
||
|
|
|
|||
|
|
|
4.摆臂0支撑-伸缩0仰俯0摆角0翻转0补偿 |
XY- ZYXRZ |
② |
|
运动方式分类 |
分类符号 |
钻臂各动作元件的配置 |
配置符号 |
凿岩范围 图形代号 |
|
极坐标式 |
R |
5.转臂$支撑-仰俯$补偿 |
RY-YZ |
④ |
|
6.转臂$摆臂$支撑-仰俯$补偿 |
RXY-YZ |
④ |
||
|
7.转臂$支撑-伸缩$仰俯$补偿 |
RY-ZYZ |
④ |
||
|
8.转臂$支撑-仰俯-仰俯$摆角$补偿 |
RY-Y - YXZ |
④ |
||
|
9.摆臂$转臂$支撑-仰俯$补偿 |
XRY-YZ |
④ |
||
|
复合坐标式 |
XY-R |
10.摆臂$支撑-旋转$仰俯$摆角$补偿 |
XY - RYXZ |
③ |
|
11.摆臂$支撑-旋转$伸缩$仰俯$摆角$补偿 |
XY-RZYXZ |
③ |
||
|
12.摆臂$支撑-旋转$仰俯$补偿 |
XY-RYZ |
③ |
||
|
RXY |
13.转臂$摆臂$支撑-仰俯$摆角$补偿 |
RXY - YXZ |
④ |
|
|
14.转臂$摆臂$支撑-伸缩$仰俯$摆角$补偿 |
RXY-ZYXZ |
④ |
||
|
直接坐标式 |
2- 3 |
15.后三角支撑-前三角摆动$补偿 |
2-3Z |
⑤ |
|
16.后三角支撑-前三角摆动$翻转$补偿 |
2-3RZ |
⑥ |
||
|
17.后三角支撑-伸缩$前三角摆动$翻转$补偿 |
2-Z3RZ |
⑥ |
||
|
2-R |
18.后三角支撑-伸缩$旋转$摆角$仰俯$补偿 |
2-ZRXYZ |
⑥ |
凿岩范围图形

如表2-1所示,每一种钻臂都有各自的特点,适用于一定的条件,所以如何根据具 体情况选择合适的钻臂就显得十分重要。现从五个方面对四类六种形式的钻臂做一比 较(见表2-2 ),供选择时参考。
表2-2钻臂比较表
|
钻臂类型 |
是否适于 单臂钻车 |
可钻范围 利用率 |
转动惯量 大小 |
适于打何种掏槽孔 |
操作方便性 |
|
|
直角坐标式 |
XY |
否 |
高 |
最小 |
任意 |
好 |
|
极坐标式 |
R |
是 |
低 |
最大 |
直线、锥形及部分垂直楔形 |
较差 |
|
复合坐标式 |
XY - R |
是 |
高 |
稍大 |
任意 |
较好 |
|
RXY |
是 |
低 |
最大 |
任意 |
较好 |
|
|
直接定位式 |
2- 3 |
是 |
低 |
最小 |
任意 |
最好 |
|
2-R |
是 |
低 |
稍大 |
任意 |
好 |
|
从表2-2可看出:(1)复合坐标式中XY- R类,因其综合性能优越,适用范围广,故会得到更多的应用;(2)极坐标式钻臂缺点较多,属于被淘汰产品(实际上已很少采用); (3 )在大型巷道中直接定位A-V型钻臂能节省许多对炮孔移位时间,且操作直观,会得 到更大的发展;(4)冷后对既能用于前方凿岩,又能用于顶板和侧向凿岩的钻臂会有更大 的发展(一机多能)。
免责声明:矿库网文章内容来源于网络,为了传递信息,我们转载部分内容,尊重原作者的版权。所有转载文章仅用于学习和交流之目的,并非商业用途。如有侵权,请及时联系我们删除。感谢您的理解与支持。